Нами изучено также изменение скорости движения воздуха и воздушно — капельной смеси от конструктивных и режимных параметров распылителя. На рисунке представлена зависимость скорости движения воздуха Vв от величины его давления Рв и высоты h щелевого сопла на расстоянии от него 0,35 м (здесь 0,35 м — это радиус цилиндрической камеры протравливания, где проходит процесс обработки семян раствором рабочей жидкости).
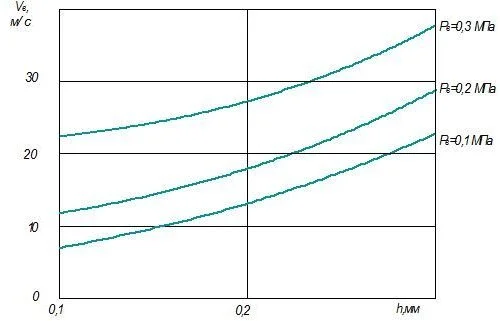
Как показано на рисунке, скорость воздушной струи на расстоянии 0,35 м от сопла увеличивается с ростом зазора (высоты щелевого сопла) и давления. При низком давлении 0,1 МПа и зазоре в щелевом сопле 0,1 мм скорость воздуха имеет величину 7 м/с на расстоянии 0,35 м от сопла. При тех же параметрах, но высоте сопла 0,2 мм скорость увеличивается почти в 2 раза, а при h=0,3 мм — в 3 раза. При оптимальном давлении воздуха 0,2 МПа этот рост скорости воздушной струи проходит с меньшей интенсивностью в зависимости от высоты щелевого сопла, а при Рв=0,3 МПа прирост скорости ещё меньше.
Аппроксимированные зависимости (рисунок 2) скорости воздушной струи Vв от Рв и h адекватно описывают процесс, т.к. значения табличных данных критерия Кохрена меньше расчетных
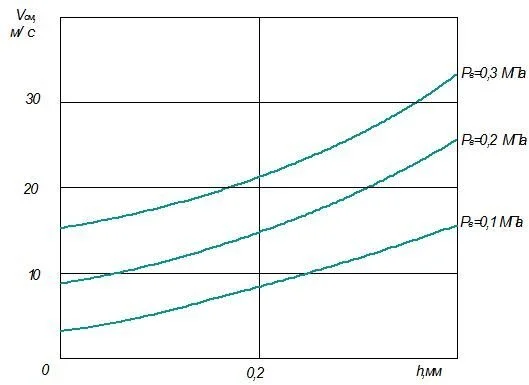
Аналогична изменяется скорости воздушно — капельной смеси от Рв и h на расстоянии 0,35 м от сопла (рисунок 3). Здесь также при самом высоком давлении воздуха (0,3 МПа) интенсивность прироста скорости движения воздушно — капельной смеси с увеличением высоты щелевого сопла снижается по сравнению с более низким давлением воздуха (0,1 и0,2 апельной смеси от h и Рв адекватны..
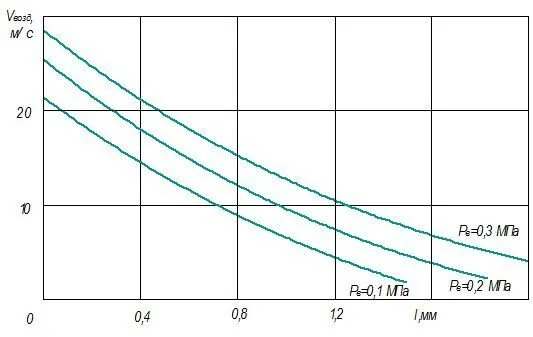
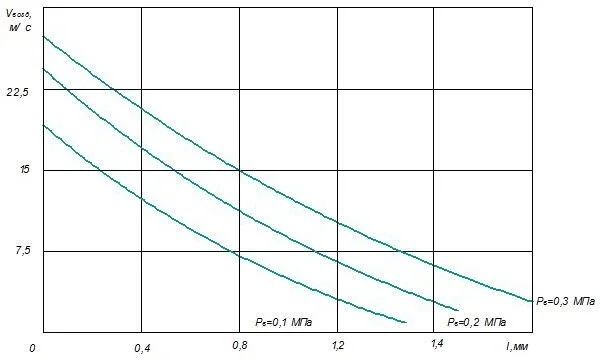
Зависимости скорости движения воздуха Vв (рисунок 4) и воздушно — капельной смеси Vсм (рисунок 5) от расстояния ℓ до обрабатываемого объекта и от величины давления Рв позволяют сделать вывод о ее снижении с увеличением расстояния от сопла. Зависимости получены при высоте воздушного сопла h=0,2 мм Для всех полученных зависимостей характерно более высокое значение скорости при более высоком давлении воздуха при прочих равных условиях.