Для обоснования разработки новой техники и инструментов необходимы статистические данные. Проанализируем опасные ситуации по проливам и разливам нефтепродуктов на водных объектах (рис. 1).
![Статистические данные аварийной обстановки по проливам нефтепродуктов на территории РФ за последние три года [1]](/res/0001774101.webp)
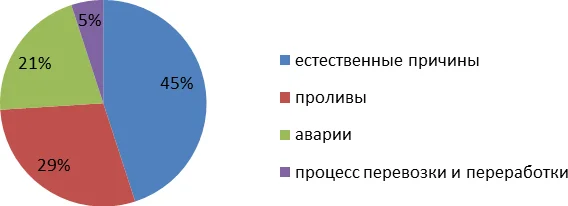
Среди причин прорывов трубопроводов в России названы «коррозионный» износ коммуникаций, а также сложная инженерно-геологическая обстановка, которая достаточно обширная и сменяет несколько климатических зон. Проливы нефтепродуктов занимают второе место по общим потерям (рис. 2).
В результате проведенных исследований выяснилось, что большинство трубопроводов для осуществления погрузочно-разгрузочных или заправочных работ используется без капитального ремонта более 30 лет.
Проливы нефтепродуктов происходят повсеместно: от Арктической зоны до Индийского и Атлантических океанов, а также внутренней пресной акватории России. Только за последний год увеличилось число разливов нефтепродуктов в 20 раз, количество же проливов часто не поддается статистическому учету. Проблема техносферной и пожарной безопасности особо актуальная при аварийных проливах нефтепродуктов на водных объектах. Мониторинг обстановки иногда осложняется погодными условиями, пагубной пожароопасной обстановкой, аварийно-опасными ситуациями, что подтверждает актуальность темы исследования. Поэтому разработка модели технической конструкции мобильного беспилотного аппарата для мониторинга водной акватории актуальна.
Робототехнический комплекс для мониторинга (рис. 3) состоит из элемента связи (антенна) 1, блока с элементами питания и электронного управления 3, системы контрольных датчиков 5, системы маневрирования и управления 2 и 4. Перечисленные элементы закреплены жестко на раме 6 и подсоединены к двум понтонам 7, обеспечивающим положение на поверхности воды.

Внизу данной робототехнической платформы может находиться автоматизированный забор проб и тестовая система. Все процессы автоматизированы, что и является отличительной особенностью предлагаемой модели роботизированной платформы является не только мониторинг обстановки.
Таким образом, предлагаемое устройство может применяться в различных ситуациях, в том числе при аварийных ситуациях на водных объектах, а также угрозы возникновения взрывов и пожаров.
Разработанный робототехнический комплекс способствует обеспечению устойчивого контроля экологической, пожарной и техносферной безопасности на водных объектах [3, 4]. Выполнение поставленных задач данного научного исследования позволило получить следующие основные технологические результаты: получили возможность обнаружения локальных и аварийных проливов нефтепродуктов на поверхности воды; снизили затраты на ликвидацию аварийных проливов углеводородов на поверхности воды; разработали роботизированную платформу; участие человека сведено на оперативный контроль дистанционного управления робототехнической платформой.
Обоснование применения новых инструментов и средств мониторинга безопасности на водных объектах, позволяет повысить эффективность подразделений пожарной охраны и войск гражданской защиты, соблюдая при этом техносферную и пожарную безопасность, что способствует снижению людских потерь и экологического ущерба.